2.1.3. DRAM 存取
一支程式使用虛擬位址(virtual address)來選擇記憶體位置。處理器將其轉譯(translate)成實體位址(physical address),最終由記憶體控制器選擇對應於這個位址的 RAM 晶片。為了選擇 RAM 晶片中的個別記憶單元,實體位址的一部分會以數條位址線(address line)的形式被傳遞進去。
由記憶體控制器個別定址(address)記憶體位置是極為不切實際的:4GB 的 RAM 會需要 232 條位址線。作為替代,位址會使用較小的一組位址線,編碼成二進位數字傳遞。以這種方式傳遞到 DRAM 晶片的位址必須先被解多工(demultiplex)。有 條位址線的解多工器(demultiplexer)將會有 2 條輸出線(output line)。這些輸出線能被用以選擇記憶單元。對於小容量的晶片而言,使用這種直接的方法是沒什麼大問題的。
但假如記憶單元的數量增加,這個方法就不再合適。一個 1Gbit6 容量的晶片將會需要 30 條位址線以及 230 選擇線(select line)。在不犧牲速度的前提下,解多工器的大小會隨著輸入線(input line)的數量以指數成長。用於 30 條位址線的解多工器需要大量的晶片空間,外加解多工器的(尺寸與時間)複雜度。更重要的是,同時在位址線上傳輸 30 個脈衝(impulse)比「只」傳輸 15 個脈衝還要難得多。Fewer lines have to be laid out at exactly the same length or timed appropriately.7
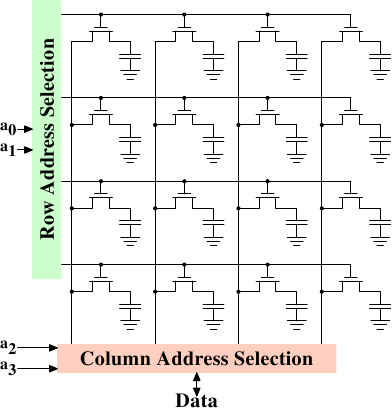
圖 2.7 顯示了以極高階角度示意的 DRAM 晶片。DRAM 記憶單元被組織在列(row)與行(column)中。雖然它們可以全都排成一列,但 DRAM 晶片會因而需要一個龐大的解多工器。藉由陣列(array)的方式,便能夠以各為一半大小的一個解多工器與一個多工器達到這種目的。8這從各方面來說都是個大大的節約。在這個例子中,位址線 與 透過列位址選擇(row address selection)()9解多工器選擇一整列記憶單元的位址線。在讀取時,所有記憶單元的內容都能夠被行位址選擇(column address selection)多工器(multiplexer)()取得。基於位址線 與 ,其中一行的內容便能夠提供給 DRAM 晶片的資料針腳(pin)。這會在許多 DRAM 晶片上平行地發生多次,以產生對應於資料匯流排寬度的所有位元。
對於寫入操作,新的記憶單元的值會被置於資料匯流排中,然後––當記憶單元藉由 與 選取時––儲存到資料單元中。相當直觀的設計。這實際上有著––顯然地––更多的困難。需要規範發出訊號之後,在資料能夠由資料匯流排讀取之前有多少延遲。如同上節所述,電容無法立即充放電。來自於記憶單元的訊號太微弱了,以致於它非得被放大(amplify)不可。對於寫入操作,必須指定設置完 與 之後,資料必須在匯流排維持多久,才能夠成功地在記憶單元中儲存新值(再提醒一次,電容不會立即被充放電)。這些時間常數(constant)對於 DRAM 晶片的效能而言是至關重要的。我們將會在下一節討論這些。
一個次要的可擴展性問題是,令 30 條位址線都連接到每個 RAM 晶片也不大可行。一個晶片的針腳是個寶貴的資源。必須盡可能多地平行傳輸資料(像是一次 64 位元)已經夠「糟」了。記憶體控制器必須能夠定址每個 RAM 模組(module)(RAM 晶片的集合)。假如因為效能因素,需要平行存取多個 RAM 模組,並且每個 RAM 模組需要它所擁有的一組 30 條或者更多條位址線,那麼僅為了處理位址,記憶體控制器就必須要有––以 8 個 RAM 模組而言––多達 240+ 根針腳。
為了克服這些次要的可擴展性問題,DRAM 晶片––長期以來––必須自行多工位址。這代表位址會被轉變成兩個部分。由位址位元(圖 2.7 的例子中的 與 )組成的第一個部分選取列。這個選擇直到撤銷之前都會維持有效。接著第二個部分,位址位元 與 ,選取行。決定性的差異在於,只需要兩條外部的位址線。譯註需要額外一些少量的線路來代表能否取得 與 的線路,但這對於減半位址線來說,這只是個很小的代價。不過,這種位址多工帶來了一些自身的問題。我們將會在 2.2 節討論這些問題。
6. 我厭惡這些 SI 前綴(prefix)。對我來說一個 giga-bit 永遠是 230 而非 109 位元。 ↩
7. Modern DRAM types like DDR3 can automatically adjust the timing but there is a limit as to what can be tolerated. ↩
8. 多工器與解多工器是對等的,並且這裡的多工器在寫入時需要如解多工器一般運作。所以從現在開始我們要忽略其差異。 ↩
9. 名字上的線表示訊號是反相的(negated)。 ↩
譯註. 這裡的意思單看字面可能比較難理解。以圖 2.7 為例,記憶體由 4 × 4 的記憶單元組成。對外僅提供兩條位址線。在選擇記憶單元時,首先由兩條外部位址線指定列,並將結果暫存起來。接著,再利用同樣的兩條外部位址線指定行。便能夠只用兩條外部位址線來指定 16 個記憶單元中的一個。詳見 2.2 節。 ↩